Retour au
début
Simulation dynamique de la conduite d'un rover martien
Des
algorithmes de
conduites extrêment simplistes permettent d'analyser le
comportement du véhicule en fonction des modèles testés et une
visualisation graphique aide à l'interprétation des résultats. La
méthode utilisée pour écrire le modèle dynamique du rover est celle que
je décris dans ce mémento
sur la dynamique multi-corps. La simulation a été écrite en
C/C++ sous l'environnement Qt, et le graphique utilise la librairie
OpenGl. L'exécutable pour windows est téléchargeable
ici.
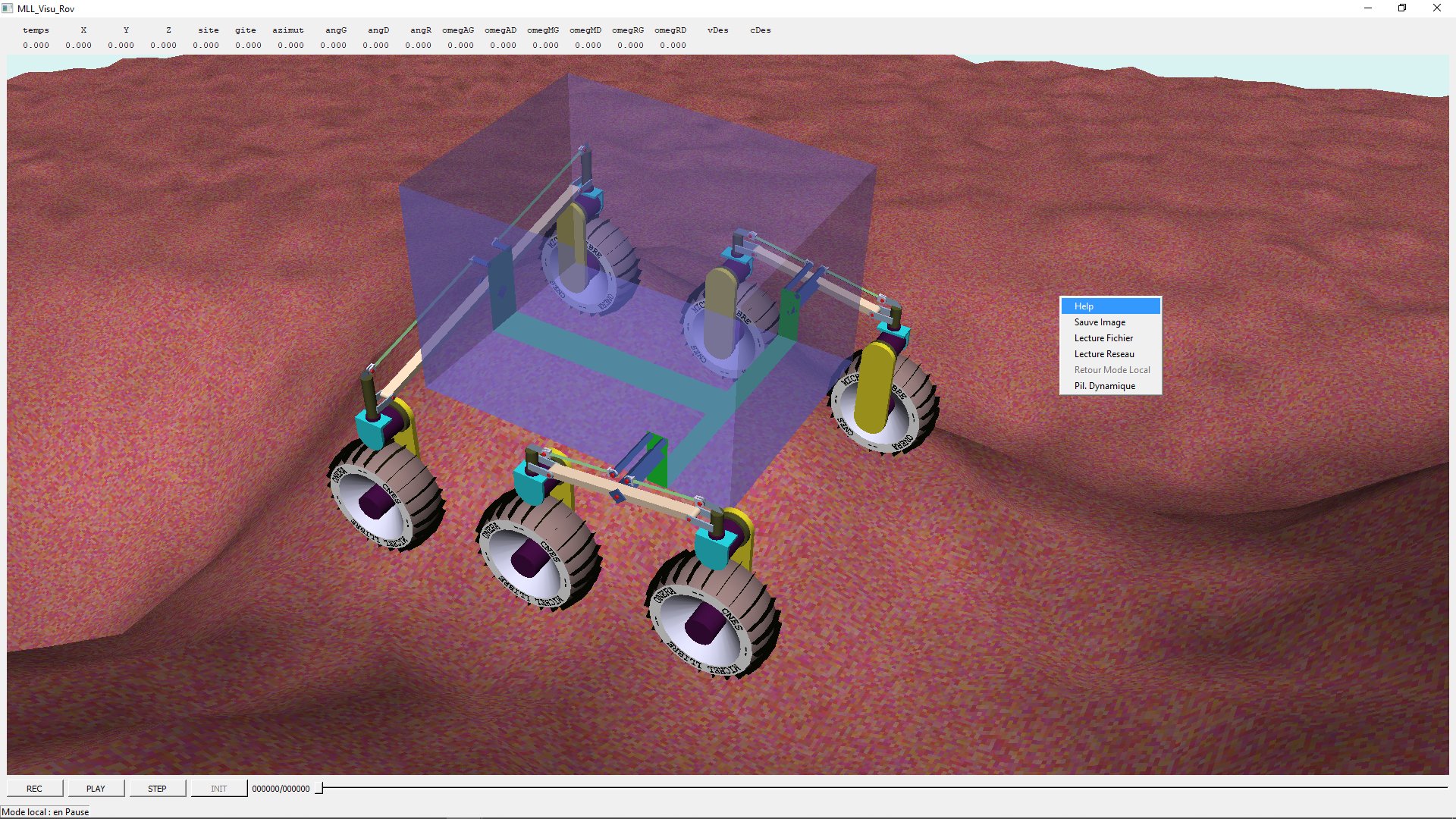
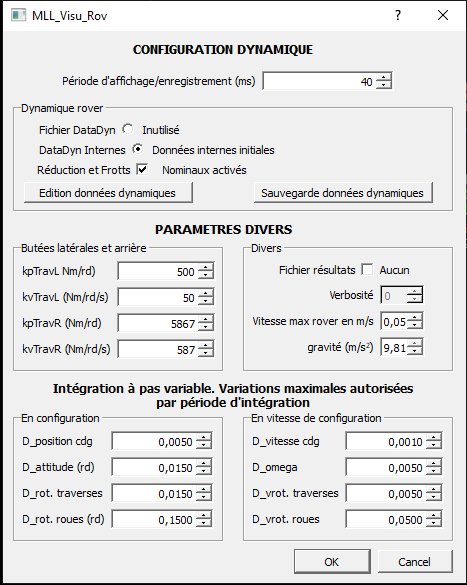
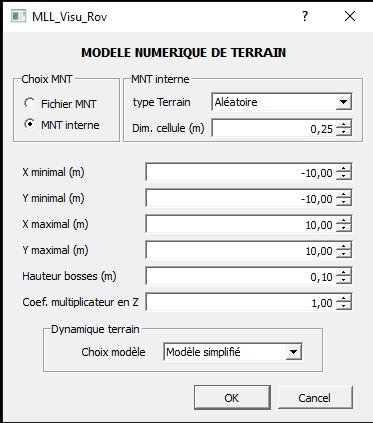
Des boites de dialogues permettent de modifier les paramètres généraux
de la simulation (cliquer pour aggrandir les images) :
 |
 |
 |
 |
| Config. intégration |
Config. paysage |
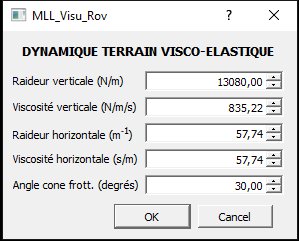
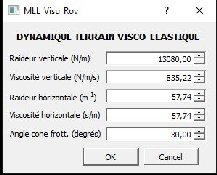
Caractéristiques sol |
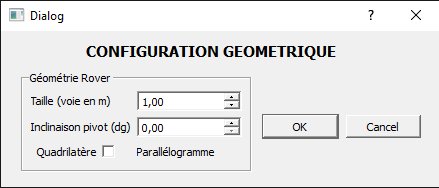
Config. géométrie |
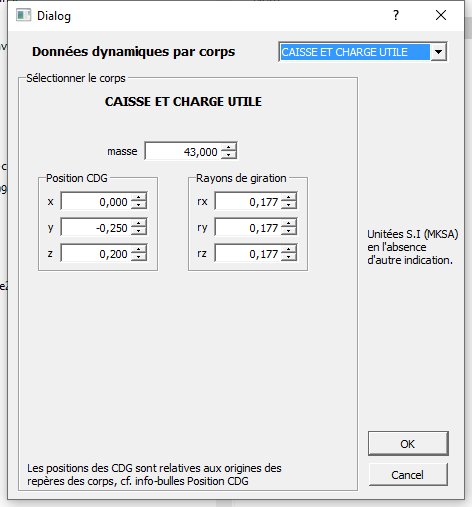
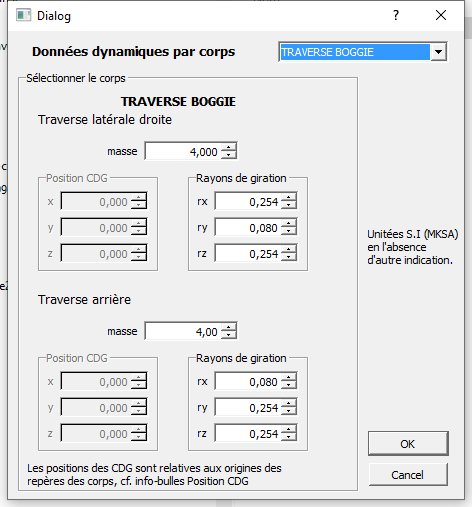
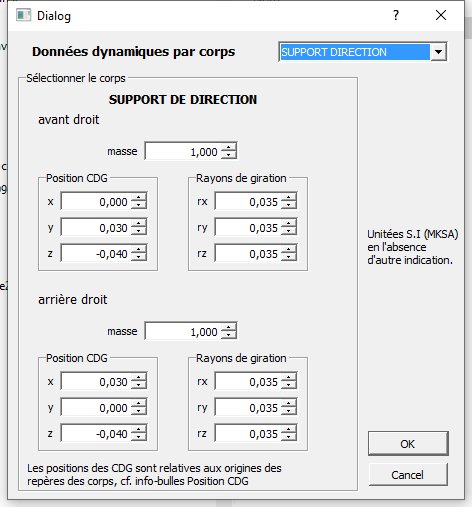
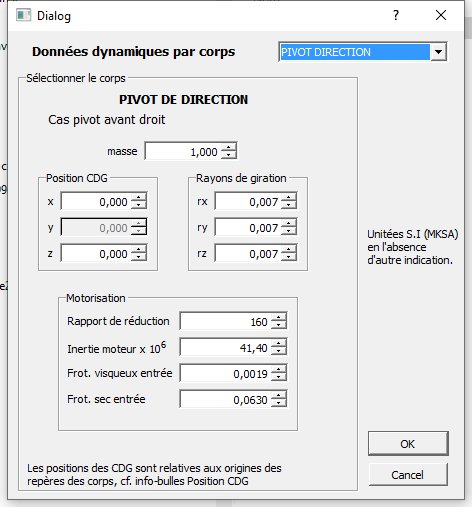
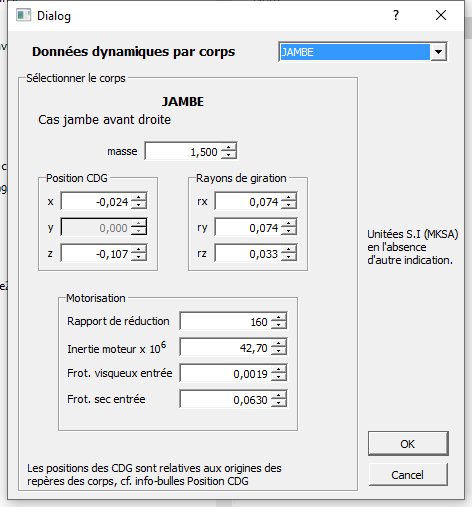
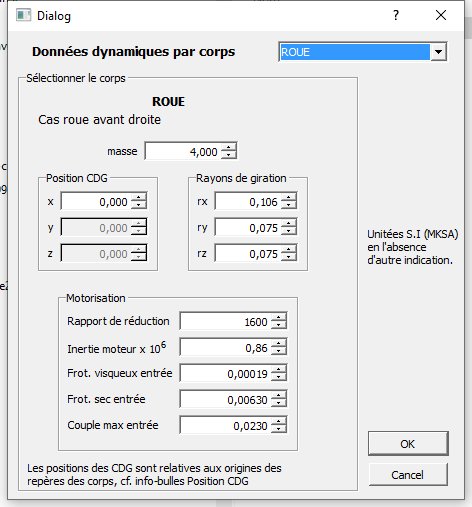
Six boites de dialogues permettent de modifier quasiment tous les
paramètres du modèle dynamique du rover (cliquer pour aggrandir les
images) :
 |
 |
 |
| Caisse et Charge
utile |
Traverse boggie |
Support direction |
 |
 |
 |
| Pivot direction |
Jambe |
Roue |
Ci dessous deux vidéos de la simulation :
 |
 |
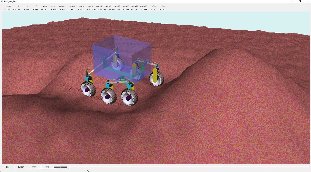
| Rover piloté |
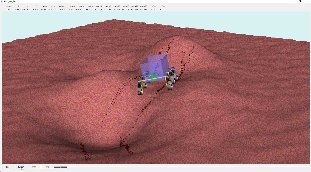
Rover libre |
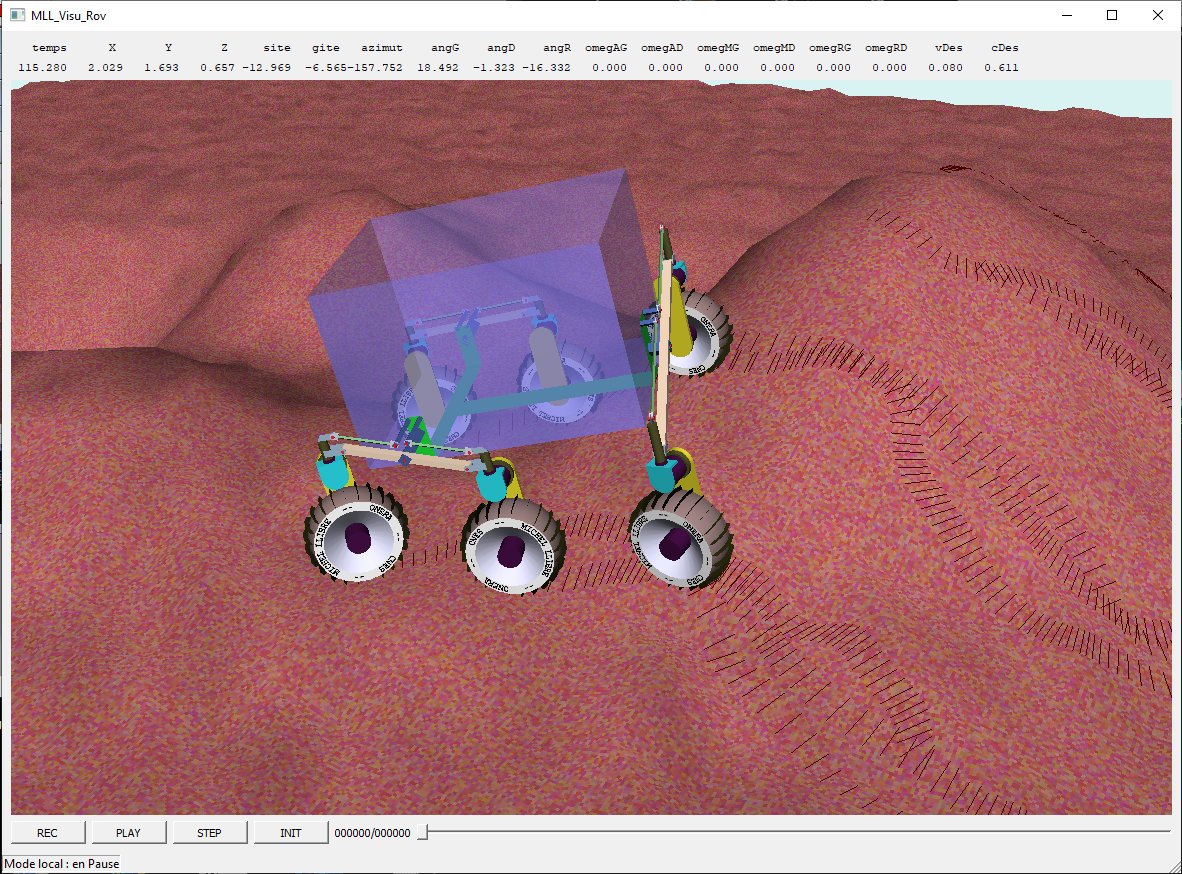
La
première vidéo montre le rover patinant lors de la tentative de montée
d'une butte. La deuxième vidéo montre le rover, en roue libre descendre
la butte. Pour cette dernière vidéo, tous les frottements ont été
annulés afin d'avoir un comportement spectaculaire.